



This HC-SR04 ultrasonic sensor uses sonar to measure the distance to an object. It is perfect for the obstacle avoiding system in your robot project.
Specification
-
Power Supply :+5V DC
-
Quiescent Current : <2mA
-
Working Currnt: 15mA
-
Effectual Angle: <15°
-
Resolution : 0.3 cm
-
Measuring Angle: 30 degree
-
Trigger Input Pulse width: 10uS
-
Dimension: 45mm x 20mm x 15mm
- Weight: 8.5g
How it works
To start measurement, the Trig pin of the sensor must receive a pulse of high (3~5V) for at least 10us, this will initiate the sensor. Then it will transmit out 8 cycle of ultrasonic burst at 40kHz and wait for the reflected ultrasonic burst. When the sensor detected ultrasonic from receiver, it will set the Echo pin to high (VCC) and delay for a period (width) which proportion to distance. To obtain the distance, measure the width (Ton) of Echo pin.
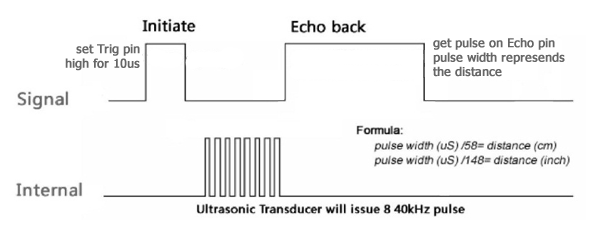 Time = Width of Echo pulse, in us (micro second)
Time = Width of Echo pulse, in us (micro second)
-
Distance in centimeters = Time / 58
-
Distance in inches = Time / 148
-
Or you can utilize the speed of sound, which is 340m/s
Usually the pulse width should be 150us~25ms. If there is no object detected, you will get about 38ms.
Showcase
Here is a wonderful example: http://www.uugear.com/?p=225


 1")

Reviews
There are no reviews yet.